How to provide an effective and practical safety assisted driving system for the driver is an important issue for safe driving of the vehicle. The machine vision-based fatigue driving detection technology has been extensively studied at home and abroad, among which the detection of driver's eye features is the most extensive.
Based on the design principle of low cost, low power consumption and high real-time performance, this paper constructs a hardware platform with ARM+DSP, and transplants the embedded operating system Windows CE 5.0, and designs a fatigue driving detection algorithm based on driver's eye features. Real-time detection and alarming of the driver's driving process to improve driving safety and comfort.
1 hardware platform design
The system hardware platform uses S3C2440 of Samsung ARM9 architecture as the core processor, and uses TI's TMS320DM642 as the video acquisition and processing module. Its structural block diagram is shown in Figure 1. The DSP platform is mainly responsible for collecting image and image algorithm processing. The ARM platform mainly completes the control processing of the entire system, and the two communicate and synchronize through the network port. During the operation of the system, the ARM platform can display the captured video and the results of the corresponding eye fatigue feature recognition in real time, and the user can set and control the system through the touch screen interactive interface. In order to ensure the high reliability of the system platform to achieve complex system scheduling, the operating system is transplanted to the platform of the system in the design process. The DSP platform is transplanted with the DSP/BIOS system, and the ARM platform is transplanted with the Wince operating system. 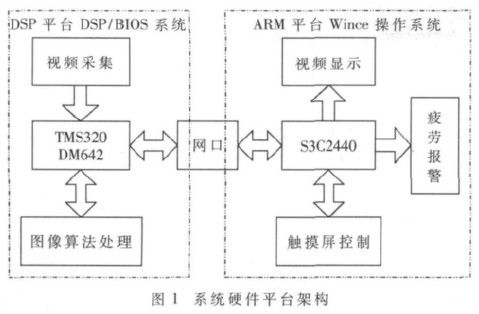
The S3C2440 is an embedded microprocessor based on the ARM92OT core with 16/32 bit RSIC structure. It has a frequency of 400 MHz and a maximum of 533 MHz. It is rich in resources and has powerful processing capabilities. The system storage expands 64 MB of NANDFlash and 64 MB of SDRAM; there is also 2 MB of NORFalsh for the system boot loader [1].
The TMS320DM642 chip [2] is capable of high-speed digital video encoding and decoding in real time and high speed. It is a powerful high-performance single-chip multimedia processor with high quality, multi-channel, superior video processing performance and complete software programmable. Features; based on the C64x family of VelociTI.2 DSP architectures, compatible with TI's other C64x digital signal processor codes, with 500/600 MHz clock frequency, high performance, with a transfer rate of 4 000/4 800 MIPS; The main features of the C64x series of chips are also highly integrated with interfaces for external devices such as audio and video to facilitate multimedia application development.
This article refers to the address: http://
2 image recognition algorithm
2.1 Overall inspection process
Firstly, the driver's face position is detected according to the clustering characteristic of the facial skin color. On the basis of the face detection, the approximate position of the eye is determined according to the geometric position distribution of the eye on the human face, and the area of ​​the eye detection is narrowed down; Secondly, in the narrow eye search area, the Sobel edge detection algorithm is used to detect the edge of the eye region, extract the edge information of the eye, and binarize it; then the binarized eye The connected component analysis is performed in the region, and the binary image filtering method based on region connectivity is used to remove the interference of the image noise points around the eye. Then, according to the improved integral projection algorithm, the distance between the left and right eye corners and the upper and lower eyelids is calculated to determine the driver's eyes. State; finally, the blink frequency is defined and the detection of fatigue driving is achieved accordingly. The specific algorithm flow is shown in Figure 2. 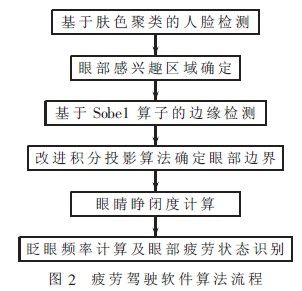
2.2 Face Detection Based on Skin Color Clustering
Skin color is not sensitive to facial expressions, head rotation, and changes in image scale, but an important feature of face detection. In the HSV color space, the illuminance and chromaticity of the image are separated, and the skin color clusters are tighter and less susceptible to ambient light. Therefore, this paper uses the skin color clustering algorithm based on RGB and HSV color space to detect the driver's face. The image captured from the camera is in RGB format, which can be converted from RGB color space to HSV space using equation (1) [3]. 
2.3 Eye area of ​​interest determination
Assume that the detected face area is HF and the width is WF. In the vertical direction, the eyes are located approximately one-half of the face and below the head.
The area of ​​the HF/5. In the horizontal direction, the eye boundary region is positioned from the WF/8 at the left border of the face to the region at WF/8 from the right border of the face. According to the above principle, the initial eye detection area is a rectangular EFGH area as shown in FIG. 
2.4 Edge detection based on Sobel operator
The edge is where the gray level of the image changes drastically. In the process of changing from skin to white to pupil, it contains rich edge information of the eye image. Therefore, the edge of the eye can be extracted as the human eye by edge extraction. And the basis of positioning. The edge detection of the initial eye detection area using the Sobel edge operator can effectively extract the edge of the eye. Sobel operators can be expressed in matrix form as: 
2.5 Improved integral projection algorithm to determine the distance between the left and right eye corners and the upper and lower eyelids
For the filtered binary image, the initial eye detection area EFGH is first divided into the left and right portions (ie, the right eye detection area EMNH and the left eye detection area MFGN) as shown in FIG. 3 from the center line position in the horizontal direction, and then utilized. The improved integral projection algorithm determines the left and right eye corner distances and the upper and lower eyelid distances of the left and right eyes in the left and right eye detection regions, respectively. Since the parameters determination methods of the left and right eyes are similar, the determination process of the parameters is only described by taking the right eye detection area EMNH as an example. The specific implementation process is as follows:
(1) In order to avoid the influence of the eyebrows above the eye on the positioning result during the calculation, the algorithm determines the edge of the upper and lower eyelids, and detects the area EMNH from the right eye.
The bottom row of pixels starts searching upwards, counting the number of pixels in each row whose gray value is equal to 1 from left to right, and the gray value in the ith row is
The sum of the number of pixels of 1 is stored in the array Nc [i], and the bottom line of the right eye detection area EMNH is defined as the 0th line, that is, i=0; i is automatically incremented by 1 after each search is completed.
(2) Perform a statistical calculation on the sum of the number of pixels whose gray value is equal to 1 in the current i-th row, if: 
3 Experiment and analysis
In order to verify the effectiveness of the eye fatigue feature detection algorithm, the captured video images were experimentally verified on the constructed ARM+DSP system. The experimental results in the Nanjing section of Shanghai-Nanjing Expressway show that the system can control the processing time within 50 ms, and achieve good real-time results. The correct rate of fatigue driving detection is 97.6%. The eye region detection result of the partial image is as shown in FIG. 4, wherein the first behavior is the facial positioning image after the face detection, the second behavior is the eye binary image after the Sobel edge detection, and the third behavior is obtained by the eye. Boundary positioning image. 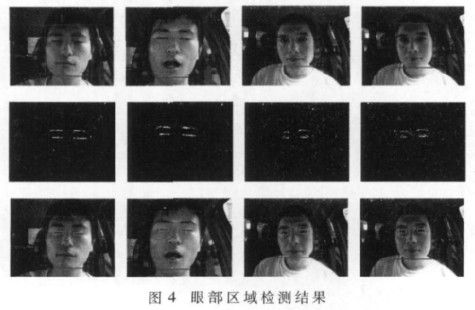
It has been observed that, in general, when the driver blinks and closes the eyes, the left and right eyes are synchronized, that is, simultaneously opened or closed at the same time. Therefore, when judging the state of the eyelid closure, in order to reduce the amount of calculation, only the collapse condition of the left eye is judged. With respect to the eye region detection result shown in FIG. 4, the size of the left eyelid closure is calculated by the equation (8), and the calculation results are shown in Table 1. 
As can be seen from Table 1, the closedness values ​​of the eyes shown in the first column and the second column in Fig. 4 are significantly smaller than those in the third and fourth columns when the eyes are open. Therefore, as long as the appropriate threshold is selected, according to the size of the eye closure value, the driver's eyes can be effectively judged.
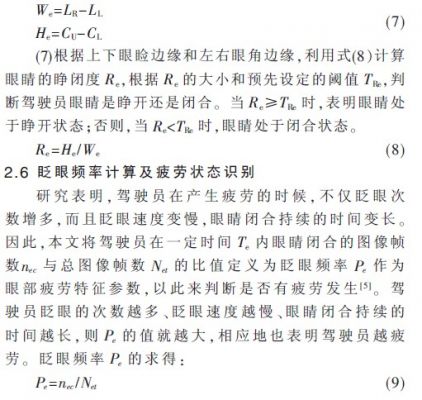
In this paper, the fatigue driving detection algorithm based on eye features is implemented on ARM+DSP system. Using the face detection algorithm based on skin color clustering to determine the face boundary, a simple and effective improved integral projection algorithm is used to realize the effective judgment of the driver's eye closure state and the real-time detection of fatigue driving.
MPPT Wind solar hybrid street-lighting Controller is the firstly apply MPPT technology for the small power wind generator in china. With the application of this technology, the charge efficiency has vastly improved under the situation of low-wind, and obvious exceed the traditional PWM charging mode of 30%. Presently, we have solved such so technical problem on charging efficiency of the low-power wind generator already. Especially apply to the horizontal and vertical low-power wind generator of 100W to 600W. This type controller has strong compatibility and a great various protection functions, have more 10 years of application practice to improve performance continuously to make it has high reliable and stability. It can be used to the street lighting, monitoring system, outdoor advertisement, home type generation system etc.
Off-grid Wind Solar Hybrid Controller
Off-Grid Solar Wind Hybrid Controller,Pwm Controller,Remote Controller,Wind Solar Hybrid Controller
Delight Eco Energy Supplies Co., Ltd. , https://www.cndelight.com