The automatic hovering is to fix the drone in the preset height position and horizontal position, that is, a set of three-dimensional coordinates, and only three-dimensional in the space can be positioned. However, how does the drone know its position? It is also very simple to say, the height is generally measured by an ultrasonic sensor (measuring the distance from the ground) or a barometer (the height affects the change of atmospheric pressure), and the coordinates of the horizontal position are determined by the GPS module. Of course, GPS can also provide height information, but for mainstream drones, it is more inclined to use a barometer, because the low-cost GPS data refresh rate is too low, the data lag will lead to drones during high-speed motion. The height is falling.
In addition to the GPS mode for positioning, the drone also has a "attitude mode" that relies on the internal IMU (Inertial Measurement Unit, which is actually a set of gyroscope + accelerometer sensors) to identify its flight state and relative displacement. With the manual operation of the flight controller, let it reach the predetermined position to hover.
In the case that the indoor GPS signal is not good, the "visual positioning" of the camera can also be used to realize the automatic hovering of the drone. For example, Dajiang’s “Wu†series of high-end products have this function.
[How does GPS locate coordinates? 】
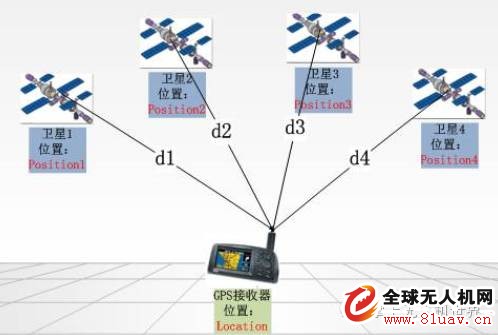
GPS positioning actually determines the position of the GPS receiver through four satellites at known locations.
1) Where does the location information come from?
In fact, GPS satellites operating in space each constantly broadcast their current position coordinate information to the world through satellite signals. Any GPS receiver can easily receive this information via the antenna and be able to read it (this is actually one of the core functions of every GPS chip). This is the source of these location information.
2) Where does the distance information come from?
We already know that every GPS satellite is busy broadcasting its location, and when sending location information, it will also attach the timestamp when the packet was sent. After the GPS receiver receives the data packet, the current time (the current time can only be determined by the GPS receiver itself) is subtracted from the time stamp, which is the time it takes for the data packet to be transmitted over the air. Knowing the transmission time of the data packet in the air, multiplying his transmission speed is the distance that the data packet is transmitted in the air, that is, the distance from the satellite to the GPS receiver. The data packet is transmitted by radio waves, then the ideal speed is the speed of light c. If the propagation time is recorded as Ti, it is expressed by the formula:
Di=c*Ti(i=1,2,3,4); this is the source of di(i=1,2,3,4).
3) Why do you need 4 satellites?
Theoretically speaking, taking the three-dimensional coordinates (X, Y, Z) of the ground point as the undetermined parameter, it is only necessary to measure the distance of the three satellites to the ground point to determine the three-dimensional coordinates of the point. However, the satellite distance is obtained by multiplying the propagation time difference Δt of the signal by the propagation velocity v of the signal. Among them, the propagation speed v of the signal is close to the speed of light in the vacuum, and the magnitude is very large. Therefore, this requires a very accurate measurement of the time difference Δt, and if there is a slight deviation, the measured distance of the satellite will be thousands of miles. The time difference Δt is obtained by calculating the difference between the signal transmission time tS measured at the satellite and the time tR reached by the signal measured at the receiver. Among them, the atomic clock placed on the satellite has high stability. We think that the time of this clock is consistent with GPS; the clock at the receiver is a quartz clock, and the stability is general. We think that its clock time and GPS have time synchronization error. And use this error as a pending parameter. In this way, there are 4 undetermined parameters that need to be solved for each ground point. Therefore, at least the satellite distance data of 4 satellites to the ground point needs to be observed. From a mathematical point of view, in short, solving four unknown parameters requires at least four equations.
[How is the ultrasound set high? 】
Ultrasonic distance measurement is to send ultrasonic waves through the ultrasonic transmitting device, and calculate the distance according to the time difference when the receiver receives the ultrasonic waves. This is similar to the principle of radar ranging. The ultrasonic transmitter emits ultrasonic waves in a certain direction, and starts timing at the same time as the transmission time. The ultrasonic waves propagate in the air, and immediately return to the obstacle when the obstacle is encountered on the way, and the ultrasonic receiver stops timing immediately upon receiving the reflected wave. (The propagation speed of the ultrasonic wave in the air is 340m/s. According to the time t recorded by the timer, the distance (s) of the emission point from the obstacle can be calculated, ie: s=340t/2)
Ultrasonic directivity is strong and the distance traveled in the medium is far away, so ultrasonic waves are often used for distance measurement. In addition, ultrasonic testing is often quick, convenient, simple to calculate, easy to achieve real-time control, and can meet industrial and practical requirements in terms of measurement accuracy. Therefore, it has also been widely used in the development of mobile robots.
[How to achieve visual positioning? 】
The indoor visual positioning system of the drone is generally called "optical flow". What is optic flow? In fact, this kind of visual phenomenon is experienced every day. In essence, optical flow is the obvious visual movement you feel in this moving world (no absolute stillness, There is no absolute movement). The visual positioning system includes a camera and an ultrasonic module. The main purpose is to use a built-in optical flow sensor to convert pixel distribution, color, brightness and other information into digital signals and transmit them to the image processing system for various operations to extract the features of the target, and then according to the discrimination. The result is to control the motion of the aircraft, the ultrasonic sensor to determine the relative height, and the efficient visual processor calculation to enable the drone to achieve accurate indoor positioning hover and smooth flight.
The vision positioning system is suitable for environments with a height of 3 meters or less, no GPS signal or poor GPS signal, especially suitable for indoor flight. It relies on the surface image to obtain the displacement information, so it must ensure that the ambient light source is sufficient and the ground texture is rich. The visual positioning system cannot be positioned in the water, in dimly lit environments, and in environments where the ground has no clear texture.
[How to intelligently maintain stability? 】
After knowing your height and horizontal position through various sensors, how can the drone hover in this preset position? This is actually a set of negative feedback automatic control system (automatically adjusted back from the preset value). Taking the GPS mode as an example, when the drone is affected by the outside world and the height is increasing or decreasing, the control unit adjusts the power of the motor to compensate in the opposite direction; if the drone is blown away from the hovering position by the wind The trend, the control unit can start the side fly mode to offset it - these reactions are relatively fast, as long as the external influence is not too outrageous (professional multi-axis drones generally have no problem with the fourth-grade wind), professional unmanned The machine can handle it, so it can be settled there.
When the weather is not very good, GPS search is difficult, the attitude mode comes in handy. By relying on the IMU unit inside the drone, the system can recognize the current flight attitude and perform automatic balance compensation, as well as locking the height and horizontal position.
(Original article, please indicate the source)
UAV full industrial chain service platform
The world of handheld drones - not just information
Check products, ask for quotations, learn regulations, find services
No. 1 in hand, all the information
Given that the cost, size and ease of installation of lithium ion battery are reducing, to rely on renewable solar energy and Solar Lifepo4 Battery can be an optimal option for any residential, commercial or industrial. The back-up battery should eliminate virtually all outages, and using Li-ion should last at least five years. UFO 48V 200Ah home Lithium Battery is designed with new lithium iron phosphate (LFP) battery technology. It is operating at 48 volt, which offers a power capacity of 9.6kWh.
Wall Mounted LiFePO4 battery Features
â— Safe
UFO POWER has more than ten years experience in the lithium battery industry. We use reliable LiFePO4 batteries to ensure excellent product quality for you.
â— Long Service Life
The Lithium battery has More than 6000 cycles, a longer life span of up to 15 years approximately. Deeper depth of discharge without decreasing in battery performance.
â— Wide Compatibility
Can be equipped with UFO Self-developed Communication Protocols Conversion Module, which provides compatibility with 10 popular solar inverters on the market.

The UFO Powerwall is equipped with LCD Display Screen, making LiFePO4 battery status checking easily.
â—Easy and Quick Installation
Each Powerwall battery is equipped with battery bracket and screws for easy installation.
48V 200Ah Powerwall,Powerwall Battery Pack,Fully Charged Battery,48V Powerwall Lithium Battery
ShenZhen UFO Power Technology Co., Ltd. , https://www.ufobattery.com